#include <SimpleCCD.h>
◆ SimpleCCD()
| walberla::pe::ccd::SimpleCCD::SimpleCCD |
( |
BodyStorage & |
globalStorage, |
|
|
Storage & |
storage |
|
) |
| |
|
explicit |
◆ ~SimpleCCD()
| walberla::pe::ccd::SimpleCCD::~SimpleCCD |
( |
| ) |
|
|
override |
◆ add()
| void walberla::pe::ccd::SimpleCCD::add |
( |
BodyID |
body | ) |
|
|
private |
◆ generatePossibleContacts()
Generates a list of possible contact pairs.
This list is also stored in the member variable contacts_ for reuse lateron.
Implements walberla::pe::ccd::ICCD.
◆ getObservedBodyCount()
| int walberla::pe::ccd::SimpleCCD::getObservedBodyCount |
( |
| ) |
const |
|
overridevirtual |
◆ remove()
| void walberla::pe::ccd::SimpleCCD::remove |
( |
BodyID |
body | ) |
|
|
private |
◆ bodies_
| std::vector<BodyID> walberla::pe::ccd::SimpleCCD::bodies_ |
|
private |
◆ globalStorage_
| BodyStorage& walberla::pe::ccd::SimpleCCD::globalStorage_ |
|
private |
◆ identifier_
| std::string walberla::pe::ccd::SimpleCCD::identifier_ |
|
private |
◆ storage_
| Storage& walberla::pe::ccd::SimpleCCD::storage_ |
|
private |
The documentation for this class was generated from the following files:
- /builds/administration/walberla-website/walberla/src/pe/ccd/SimpleCCD.h
- /builds/administration/walberla-website/walberla/src/pe/ccd/SimpleCCD.cpp


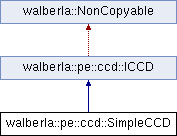
 Inheritance diagram for walberla::pe::ccd::SimpleCCD:
Inheritance diagram for walberla::pe::ccd::SimpleCCD: